سنسورهای موقعیت موتور
ورودیهای CKP (موقعیت میللنگ) و CMP (موقعیت میلسوپاپ) در DKefi از مبدلهای سیگنال تفاضلی استفاده میکنند که میتوانند ورودی را از حسگرهای VR (رلوکتانس متغیر)، هال افکت یا اپتیکال دریافت کنند. ما از CKP بهعنوان سیگنال اصلی برای محاسبات دور موتور و زمانبندی ECU استفاده میکنیم. اگرچه این نام به موقعیت روی میللنگ اشاره دارد، در برخی موارد این حسگر ممکن است روی میلسوپاپ یا داخل دلکو قرار گیرد.
سیگنال CMP یک سیگنال ثانویه است و معمولاً روی میلسوپاپ یا داخل دلکو نصب میشود. این سیگنال اطلاعات مکملی را برای تفسیر سیگنال میللنگ فراهم میکند و معمولاً دقت آن به اندازه CKP حیاتی نیست.
نحوه تشخیص CKP و CMP:
– اگر یکی از حسگرها با سرعت میللنگ و دیگری با سرعت میلسوپاپ بچرخد، حسگری که با سرعت میللنگ میچرخد CKP و دیگری CMP است.
– در سیستمهای GM Optispark و بیشتر حسگرهای اپتیکال نیسان، معمولاً حلقهای با یک شکاف به ازای هر سیلندر بهعنوان سیگنال اصلی موتور استفاده میشود. حلقه ۳۶۰ شکاف برای استارت و سرعتهای پایین به کار میرود. در این حالت، حسگر با یک شکاف در هر سیلندر، CKP و حسگر با ۳۶۰ شکاف، CMP خواهد بود.
– در اکثر سیستمهای دیگر با دو حسگر روی میلسوپاپ، حسگری که کمترین تعداد دندانه را میخواند CMP و حسگری که بیشترین تعداد دندانه را میخواند CKP است.
**نکته:** مدار مبدل سیگنال، خروجی را معکوس میکند. برای حفظ سازگاری با ECU، اگر ورودی جرقه را روی Rising Edge تنظیم کنید، در واقع این همان لحظهای است که سیگنال ورودی از حالت بالا به پایین تغییر میکند.
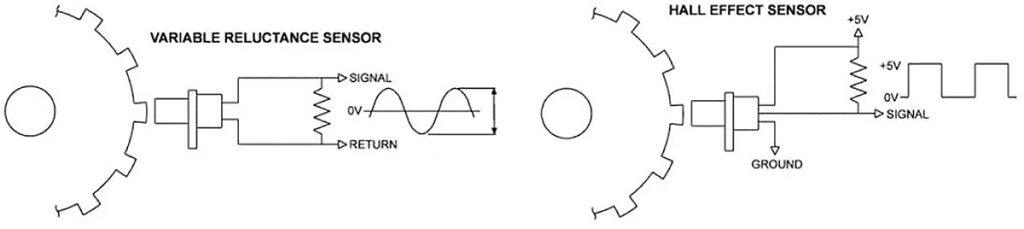
سنسور رلوکتانس متغیر (VR)
حسگرهای VR شامل یک آهنربا و یک سیمپیچ هستند که یک سیگنال متناوب (AC) تولید میکنند که با افزایش دور موتور، ولتاژ آن نیز افزایش مییابد. این حسگرها نیازی به تغذیه ندارند، زیرا خودشان ولتاژ تولید میکنند. دو ترمینال این حسگر باید به سیمهای CKP یا CMP متصل شوند و در صورت اشتباه بودن جهت سیمبندی، میتوان در نرمافزار Rising or Falling edge را تنظیم کرد.
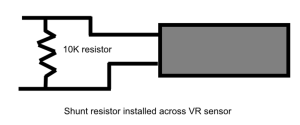
در صورت استفاده از حسگر VR روی چرخدندههایی با تعداد بالای دندانه و دندانههای حذفشده (مانند 36-1 یا 60-2) و مواجه شدن با مشکل قطع ارتباط در دورهای بالا، نصب یک مقاومت ۱۰K اهم بهصورت موازی با حسگر میتواند مشکل را برطرف کند.
سنسور Hall effect و Optical
این حسگرها از ترانزیستورهای سوئیچکننده استفاده کرده و نیاز به تغذیه خارجی (۵ یا ۱۲ ولت) دارند. حسگر معمولاً دارای سه پایه است:
- پایه تغذیه: به ۱۲ یا ۵ ولت متصل میشود (۱۲ ولت توصیه میشود).
- پایه زمین: به زمین حسگر متصل میشود.
- پایه سیگنال: به CKP+ یا CMP+ متصل میشود.
**نکته:** پایههای CMP- و CKP- نباید در این نوع حسگرها استفاده شوند و باید آزاد باقی بمانند.
برخی حسگرها یک سیگنال مربعی تولید میکنند، در حالی که برخی دیگر خروجی زمین را به خروجی float تغییر میدهند. برای این حسگرها، باید یک مقاومت ۱K اهم بین ترمینال تغذیه و ترمینال سیگنال قرار داده شود تا خروجی به درستی عمل کند. اگر از نوع حسگر خود مطمئن نیستید، میتوان آن را با اعمال تغذیه و اندازهگیری ولتاژ خروجی در دو حالت مختلف بررسی کرد.
**نکته:** در برخی موارد که حسگر هال افکت ۱۲ ولتی نویز زیادی در سیمکشی ایجاد میکند، اتصال سیمهای CKP- یا CMP- به خروجی 5Vout میتواند نویز را کاهش دهد.
به دلیل عدم وجود قطعات الکترونیکی در داخل سنسورهای رلوکتور، این سنسورها معمولاً میتوانند دماهای بسیار بالاتری را نسبت به سنسورهای اثر هال تحمل کنند. مشاهدهی عملکرد آنها در محیطهایی با دمای بیش از 200 درجهی سانتیگراد غیرمعمول نیست.
سنسورهای رلوکتور نسبت به فاصلهی هوایی (Air Gap) بین سنسور و تریگر بسیار حساستر هستند. تنظیم دقیق این فاصله بسیار حیاتی است، باید در بین تمامی دندانهها کاملاً یکسان باشد و این فاصله معمولاً بسیار کمتر از فاصلهی مورد نیاز برای سنسورهای اثر هال است، در حدود (0.3 میلیمتر) یا حتی کمتر در برخی موارد. این موضوع نیاز بیشتری به دقت در طراحی پایهی نصب سنسور تریگر دارد، زیرا حاشیهی خطای آن بسیار کمتر از یک سنسور اثر هال است. برخلاف سنسورهای اثر هال که یک موج مربعی دیجیتالی و بهراحتی قابلتفسیر تولید میکنند، خروجی سنسورهای رلوکتور متناسب با سرعت عبور دندانهی تریگر تغییر میکند. به بیان سادهتر، هرچه دندانهی تریگر با سرعت بیشتری از جلوی سنسور عبور کند، ولتاژ خروجی سنسور رلوکتور نیز بیشتر خواهد شد. این امر یک مشکل ایجاد میکند، زیرا نویز تولید شده توسط سنسور نیز افزایش مییابد و تعیین دقیق لبهی تریگر که ECU از آن برای محاسبهی زمانبندی احتراق استفاده میکند، پیچیدهتر خواهد شد.
تحریک با پلاتین و دستگاههای جایگزین
برای استفاده از سیستم پلاتین با کنترل ECU، میتوان خروجی پلاتین را مانند یک حسگر هال افکت در نظر گرفت. در این حالت، یک مقاومت ۱K اهم بین تغذیه ۱۲ ولت و خروجی پلاتین قرار داده شده و خروجی نیز به CKP+ متصل میشود. CKP- نباید استفاده شود.